







































































Obstacle Avoiding Robot Using Microcontroller
Introduction:
The Obstacle Avoiding Robot Using Microcontroller introduces an engaging educational endeavor focused on the design, construction, and programming of a robot capable of autonomously navigating through environments while intelligently avoiding obstacles. By combining elements of robotics, programming, electronics, and problem-solving, this project offers students a hands-on learning experience that stimulates their curiosity and fosters practical skills development. Moreover, with a primary objective to design a robot equipped with obstacle detection and avoidance capabilities, participants will explore the integration of key components such as ultrasonic sensors, microcontrollers, motor drivers, and servo motors to create a functional and efficient autonomous system.
Central to the project’s implementation is the selection or construction of a suitable robot chassis equipped with motor wheels, and providing mobility for navigation. Additionally, the integration of ultrasonic or infrared sensors enables the detection of obstacles within the robot’s surroundings, furnishing distance measurements crucial for informed decision-making. Furthermore, utilizing a microcontroller such as Arduino or Raspberry Pi, participants will process sensor data and orchestrate the robot’s movement. Consequently, the development of obstacle avoidance algorithms empowers the robot to navigate dynamically and safely through its environment. Through iterative testing and refinement, students will refine their understanding of robotics concepts and enhance their problem-solving abilities, ultimately culminating in the creation of a fully functional Obstacle Avoiding Robot.


Projects Categories:
Products Categories:
- Robotics
- Actuators
- Camera Modules
- Drone Kits
- Drone Components
- Chassis
- DC Motors
- Other Robotic accessories
- Pick and Place Modules
- Robotic Kit
- Servo Motors
- Stepper Motors
- Wheels
- Microcontrollers & Programmers
- 8051 Microcontroller
- Arduino Microcontroller
- ARM Development Board
- Interface Module
- NODMCU / ESP Modules
- PIC Microcontroller
- Raspberry Pi
- Devices and Actuators
- Display Modules
- Sensors & Module
- Power Supply / Batteries
- Wireless modules
- Electronic Components
- Wholesale Market




Description of Obstacle Avoiding Robot Using Microcontroller
The Obstacle Avoiding Robot utilizing a microcontroller represents an innovative application of technology in the realm of robotics. By integrating a microcontroller such as Arduino or Raspberry Pi, the robot gains the computational power necessary to process sensor data and make informed decisions about its movements. Consequently, this enables the robot to navigate through various environments with agility and precision. Additionally, the microcontroller serves as the central control unit, orchestrating the interactions between different components of the robot.
Furthermore, the incorporation of ultrasonic sensors enhances the robot’s ability to detect obstacles in its path. These sensors emit high-frequency sound waves and measure the time it takes for them to bounce back, providing accurate distance measurements. Therefore, the robot can adjust its course of action accordingly, avoiding collisions with obstacles and ensuring smooth navigation. This integration of sensor technology significantly enhances the robot’s autonomy and efficiency.
Advancements in Robotics with Microcontroller Integration
Moreover, the inclusion of motor drivers facilitates the control of the robot’s movement. Motor drivers translate the commands received from the microcontroller into actions, such as forward motion, backward motion, and turning. This seamless coordination between the microcontroller and motor drivers enables the robot to navigate through complex environments with ease. Additionally, servo motors can be employed to provide precise control over specific components of the robot, further enhancing its functionality.
Ultimately, the Obstacle Avoiding Robot utilizing a microcontroller represents a significant advancement in the field of robotics. By leveraging the capabilities of microcontrollers, ultrasonic sensors, motor drivers, and servo motors, this robot can autonomously navigate through environments while intelligently avoiding obstacles. Consequently, this project not only showcases the potential of technology to solve real-world challenges but also provides a platform for students and enthusiasts to explore the fascinating world of robotics and electronics.
Components Requirement and Working
Components Required
- Arduino Uno (Microcontroller),
- Ultrasonic Sensor,
- L298 Motor Driver,
- 18650 Li-ion Battery,
- DC Motors (Bo Motors),
- Wheels (Bo Wheels),
- SG90 Servo Motor,
- Jumper Wires,
- On/Off Switch.
The Obstacle Avoiding Robot Using Microcontroller Project essential components:
Arduino Uno (Microcontroller)
- The Arduino Uno serves as the central control unit of the robot, and processing sensory inputs and executing control commands with remarkable efficiency and versatility.
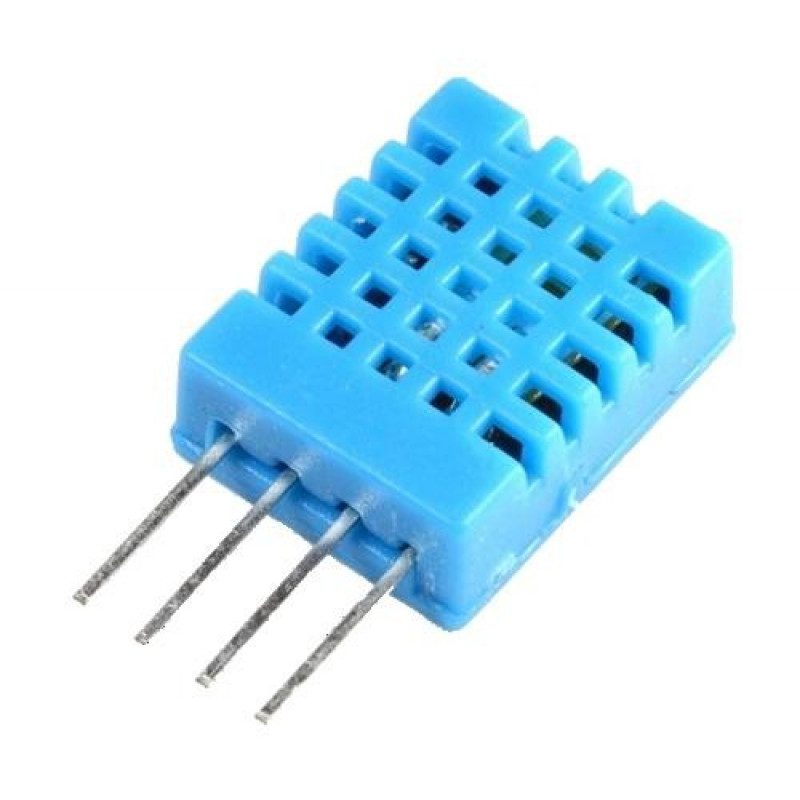
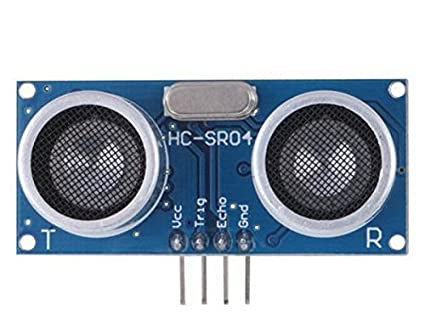
Ultrasonic Sensor:
- Functioning as the robot’s eyes, the Ultrasonic Sensor emits waves to detect obstacles and provides precise distance measurements, enabling the robot to navigate safely through its surroundings.
L298 Motor Driver:
- The L298 Motor Driver facilitates the translation of commands from the microcontroller into physical motion, regulating power to the DC Motors that drive the wheels, ensuring smooth movement and maneuverability.
18650 Li-ion Battery:
- Powering the operations of the robot, the 18650 Li-ion Battery provides a reliable and portable energy source, enabling extended periods of autonomous operation.
DC Motors (Bo Motors) and Wheels (Bo Wheels):
- These components work in tandem to propel the robot forward, backward, and turn, allowing it to traverse diverse terrains with agility and precision.
SG90 Servo Motor:
- The SG90 Servo Motor enables precise control over specific mechanisms or appendages of the robot, enhancing its versatility and functionality.
Jumper Wires and On/Off Switch:
- Jumper wires facilitate efficient communication between components, and additionally while the On/Off Switch provides convenient control over the robot’s power supply.
Working of Obstacle Avoiding Robot Using Arduino Microcontroller:
Sensory Perception:
The operation of the Obstacle Avoiding Robot begins with its sensory perception system, and primarily composed of the Ultrasonic Sensor. Additionally this sensor emits ultrasonic waves and measures the time it takes for them to bounce back after hitting obstacles, and providing precise distance and measurements. Consequently, this information allows the robot to detect obstacles in its vicinity and assess the level of danger they pose to its navigation. Because of this, the Ultrasonic Sensor serves as the robot’s eyes, and enabling it to perceive its environment and make informed decisions.
Decision Making and Control:
Once the Ultrasonic Sensor detects an obstacle, the microcontroller, typically an Arduino Uno, processes this data and executes predefined algorithms to determine the appropriate course of action. Because of this, the microcontroller acts as the brain of the robot, and analyzing sensory inputs and generating control signals for its motion. Consequently, the L298 Motor Driver receives these control signals and regulates the power supplied to the DC Motors, and enabling the robot to move forward, backward, or turn as necessary. Thus, this intricate process of decision-making and control ensures that the robot can navigate safely through its environment while avoiding collisions with obstacles.
Adaptation and Efficiency:
As the Obstacle Avoiding Robot traverses its environment, it continuously gathers sensory data and adjusts its behavior in real-time. Consequently, this adaptive behavior allows the robot to navigate dynamically and efficiently. Moreover, it responds to changes in its surroundings and avoids obstacles with agility and precision. Because of this, the robot can successfully navigate through complex environments while minimizing the risk of collisions and ensuring its safe operation. Therefore, the integration of sensory perception, decision-making algorithms, and motion control mechanisms enables the Obstacle Avoiding Robot to operate autonomously and effectively in various scenarios.
Conclusion:
In conclusion, Obstacle Avoiding Robot Using Microcontroller represents a remarkable achievement in the field of robotics, showcasing the potential of microcontroller-based systems to navigate through complex environments with autonomy and precision. By seamlessly integrating sensory perception, decision-making algorithms, and motion control mechanisms, this robot demonstrates its ability to adapt and respond to dynamic surroundings. Consequently, the Obstacle Avoiding Robot offers practical solutions to real-world challenges, such as navigating through crowded spaces or hazardous terrains, while minimizing the risk of collisions and ensuring safe operation.
Furthermore, the development and implementation of the Obstacle Avoiding Robot serve as a testament to the ingenuity and innovation within the robotics community. As technology continues to advance, robots like these hold promise for various applications, from assisting in search and rescue operations to enhancing efficiency in industrial settings. Consequently, the Obstacle Avoiding Robot serves as a compelling example of how intelligent systems can augment human capabilities and improve our quality of life. Therefore, it is imperative to continue exploring and refining such technologies, harnessing their potential to address the challenges of tomorrow and create a better, safer world for all.
To Explore More Projects: Click here




For additional blog content, to explore further insights and articles. Click here
How to attach heat sink
How to attach heat sink to raspberry pi 4 INTRODUCTION Attaching a heat sink to...
Read MoreUnderstanding Integrated Circuit And Microchips
Understanding Integrated Circuit And Microchips Introduction Integrated circuits (ICs), often referred to as microchips, are...
Read MoreExploring The world of Quantum
Exploring The World Of Quantum Sensors Quantum sensors are fascinating devices that leverage the principles...
Read MoreRaspberry Pi Microcontroller
Raspberry Pi Introduction Welcome to the world of Raspberry Pi projects, where creativity meets technology!...
Read More