
Abstract
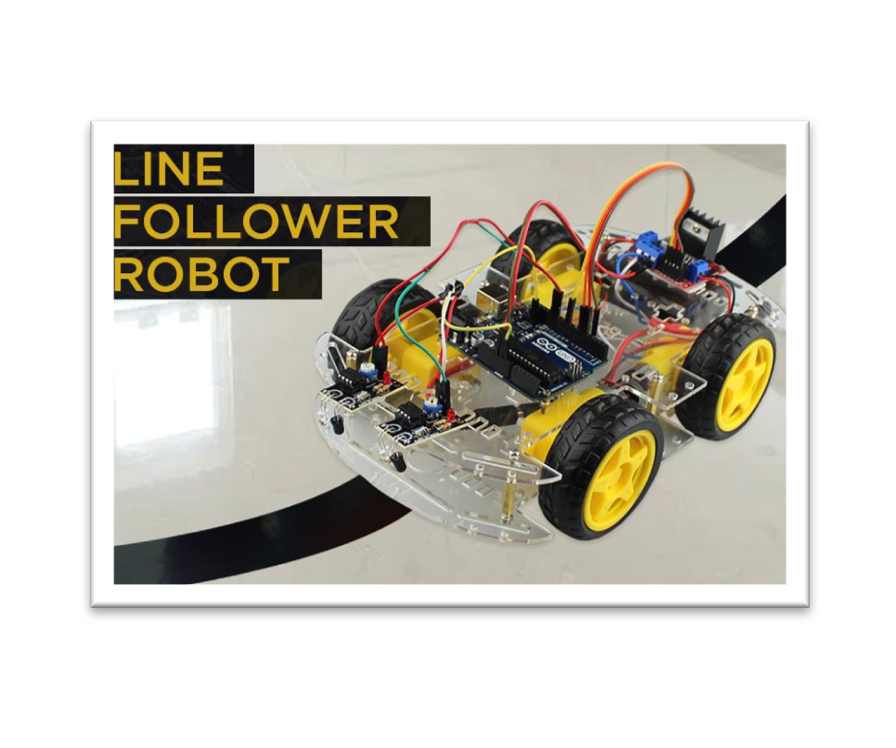
The Line Following Robot (4WD) is an advanced autonomous robot equipped with four-wheel drive for enhanced stability and traction. Using multiple infrared sensors, this robot can detect and follow a line or path accurately on various surfaces. It’s ideal for robotics enthusiasts aiming to learn about sensor integration, motor control, and real-time feedback systems with improved mobility.
Objectives
-
Develop a stable and efficient 4-wheel drive robot capable of following a line.
-
Use multiple IR sensors to increase detection accuracy and reliability.
-
Implement precise motor control to handle sharp turns and curves.
-
Explore advanced robotics concepts such as sensor fusion and control algorithms.
Components Used
-
Arduino Uno / Nano / ESP32
-
4 DC Motors with wheels
-
L298N Motor Driver Module (or equivalent)
-
Infrared (IR) Line Tracking Sensor Array (3 to 5 sensors)
-
Chassis with mounting for 4WD system
-
Battery Pack
-
Jumper wires and connectors
Working Principle
The IR sensor array scans the surface to detect the contrast between the track line and the floor. Sensor data is fed into the microcontroller, which processes the input and sends commands to each of the four motors to adjust speed and direction. This control allows the robot to navigate smoothly and maintain the line, even on complex tracks.
Methodology
-
Assemble the 4WD chassis with four motors and wheels.
-
Mount the IR sensor array at the front to detect the line accurately.
-
Connect the motors to the motor driver module and then to the Arduino.
-
Write and upload code to read sensor inputs and control motors accordingly.
-
Test and calibrate on different line patterns for optimal performance.
Applications
-
Robotics competitions and education
-
Prototype for automated guided vehicles (AGVs)
-
Industrial automation and logistics
-
Research in autonomous navigation systems
Future Enhancements
-
Incorporate PID control for smoother and more precise movement.
-
Add obstacle detection sensors for safe navigation.
-
Implement wireless control and monitoring using Bluetooth or Wi-Fi.
-
Integrate GPS modules for outdoor navigation.
Order Now!
Upgrade your network experience today with the Line Following Robot (4WD) Project Perfect for improving connectivity and ensuring seamless communication.
To Explore More Visit our Website
For more information:-www.mifraelectronics.com






Reviews
There are no reviews yet.